
หุ่นยนต์ขันโตก “Tin Carrier” ผลงานทีม KMUTT-JENO จาก ภาควิชาวิศวกรรมระบบควบคุมและเครื่องมือวัด คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.) คว้ารางวัลรองชนะเลิศอันดับ 3 (Third Prize) จากเวทีแข่งขันหุ่นยนต์ระดับนานาชาติ “The 7th Delta International Smart & Green Manufacturing Contest” จัดขึ้น ณ ประเทศจีน เมื่อปลายเดือนสิงหาคม 2564 ที่ผ่านมา โดยบริษัท Delta Electronics ที่เป็นผู้ผลิตชิ้นส่วนอิเล็กทรอนิกส์ รวมถึงแขนกลในภาคอุตสาหกรรมรายใหญ่
หุ่นยนต์ขันโตก สู่ “Tiny Carrier”
Delta Cup หรือ Delta International Smart & Green Manufacturing Contest คือเวทีแข่งขันหุ่นยนต์ระดับนานาชาติ ที่จัดขึ้นโดยบริษัท Delta Electronics บริษัทผู้ผลิตชิ้นส่วนอิเล็กทรอนิกส์รายใหญ่ รวมถึงแขนกลในภาคอุตสาหกรรม เป็นประจำของทุกปี
และในแต่ละปี จะมีทีมนักศึกษาจากสถาบันการศึกษาชั้นนำของไทย ส่งโครงการเข้าคัดเลือกในระดับประเทศ เพื่อแข่งขันในระดับนานาชาติ ซึ่งหนึ่งในนั้นคือ ทีม KMUTT-JENO จาก ภาควิชาวิศวกรรมระบบควบคุมและเครื่องมือวัด คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี (มจธ.) ที่เป็นครั้งแรกของการส่งผลงานหุ่นยนต์เข้าประกวดรางวัลนี้
เบื้องหลังการคว้ารางวัลการประกวดหุ่นยนต์ ที่ประเทศจีน

ทีม KMUTT-JENO
“เนื่องจากปีนี้ทางเรามีหุ่นยนต์ “ขันโตก” ที่เป็นผลงานของนักศึกษาเราสร้างขึ้น และภาควิชาเรานำไปมอบให้กับศูนย์รับบริจาคเพื่อช่วยเหลือผู้ได้รับผลกระทบ จากสถานการณ์การแพร่ระบาดโรคติดเชื้อไวรัสโคโรนา 2019 (COVID-19) จังหวัดสมุทรสาคร ที่เราพบว่ามีการใช้ในการขนถ่ายยา เวชภัณฑ์ และอุปกรณ์ทางการแพทย์ระยะไกล ให้กับบุคลากรทางการแพทย์ ที่นับเป็นการแสดงความสามารถด้าน Internet of Things (IoT)
ซึ่งตรงกับธีมของการแข่งขัน Delta Cup 2021 ที่ระบุว่า เป็นการเฟ้นหาผู้มีความสามารถด้าน IIoT อัจฉริยะ (Seeking Smart Industrial Internet of Things (IIoT) Talents) ทางภาควิชาจึงสนับสนุนให้ใช้หุ่นขันโตก มาต่อยอดเป็นหุ่นยนต์ที่จะร่วมการแข่งขันในครั้งนี้” ดร. อิสสระพงศ์ ค้วนเครือ อาจารย์ประจำภาควิชาวิศวกรรมระบบควบคุมและเครื่องมือวัด คณะวิศวกรรมศาสตร์ มจธ. กล่าวถึงที่มาของ ทีม KMUTT-JENO ในฐานะอาจารย์ที่ปรึกษา

ทีม KMUTT-JENO เกิดขึ้นจากการรวมตัวกันของ 3 นักศึกษา ประกอบด้วย พีรณัฐ ควรบุบผา (พี) นักศึกษาปริญญาตรี ปี 2, ปวริศร์ สอนประดิษฐ์ (ฟลุค) นักศึกษาปริญญาตรี ปี 1 และ ณัฐพัสตร์ เกษศรีรัตน์ (ปัญปัญ) นักศึกษาระดับปริญญาโท เมื่อประมาณเดือนกุมภาพันธ์ 2563 เพื่อเขียนโครงงานการพัฒนาหุ่นยนต์ เข้ามาแข่งขันหาตัวแทนในระดับประเทศ
พีรณัฐ ควรบุบผา หรือ พี เจ้าของผลงานหุ่นยนต์ขันโตก เล่าว่า หุ่นขันโตกที่สร้างให้กับภาควิชาเมื่อต้นปี 2564 คือหุ่นยนต์ขันโตกตัวที่ 2 โดยตัวแรกสร้างร่วมกับเพื่อนชมรมหุ่นยนต์ของโรงเรียนเก่า สมัยอยู่มัธยม ช่วงปิดเทอมปี 1 เพื่อมอบให้กับโรงพยาบาลพะเยา แต่สำหรับหุ่นยนต์ตัวที่ 3 ที่สร้างเพื่อแข่งขันนั้น เปลี่ยนชื่อจากขันโตกมาเป็น “Tiny Carrier”
“เนื่องจากหุ่นยนต์สองตัวแรก เป็นหุ่นที่ต้องการนำมาใช้ทดแทนรถเข็นบรรทุกของ เพื่อให้บุคลากรของโรงพยาบาลบังคับควบคุมการเคลื่อนที่ผ่านรีโมทบังคับ (Remote Controller) แทนการใช้แรงเข็น ซึ่งของที่เข็นส่วนหนึ่งก็จะเป็นอาหารสำหรับผู้ป่วย เราจึงใช้ชื่อว่าขันโตกที่ทุกคนฟังแล้วเข้าใจ แต่หุ่นตัวใหม่นี้ เราอยากให้ใช้เพื่อลดความเสี่ยงที่พยาบาลจะต้องสัมผัสตัวผู้ป่วยโควิด-19 จึงอยากได้หุ่นที่เคลื่อนที่ได้โดยไม่ต้องมีคนบังคับ และจัดการกับผู้ป่วยแทนพยาบาลได้ในบางเรื่อง เช่น การจ่ายยา การวัดอุณหภูมิ วัดความดัน และใช้ชื่อหุ่นว่า Tiny Carrier เพื่อให้กรรมการที่เป็นชาวต่างชาติได้ยินชื่อแล้วเข้าใจได้ง่าย” พี เล่าถึงที่มา
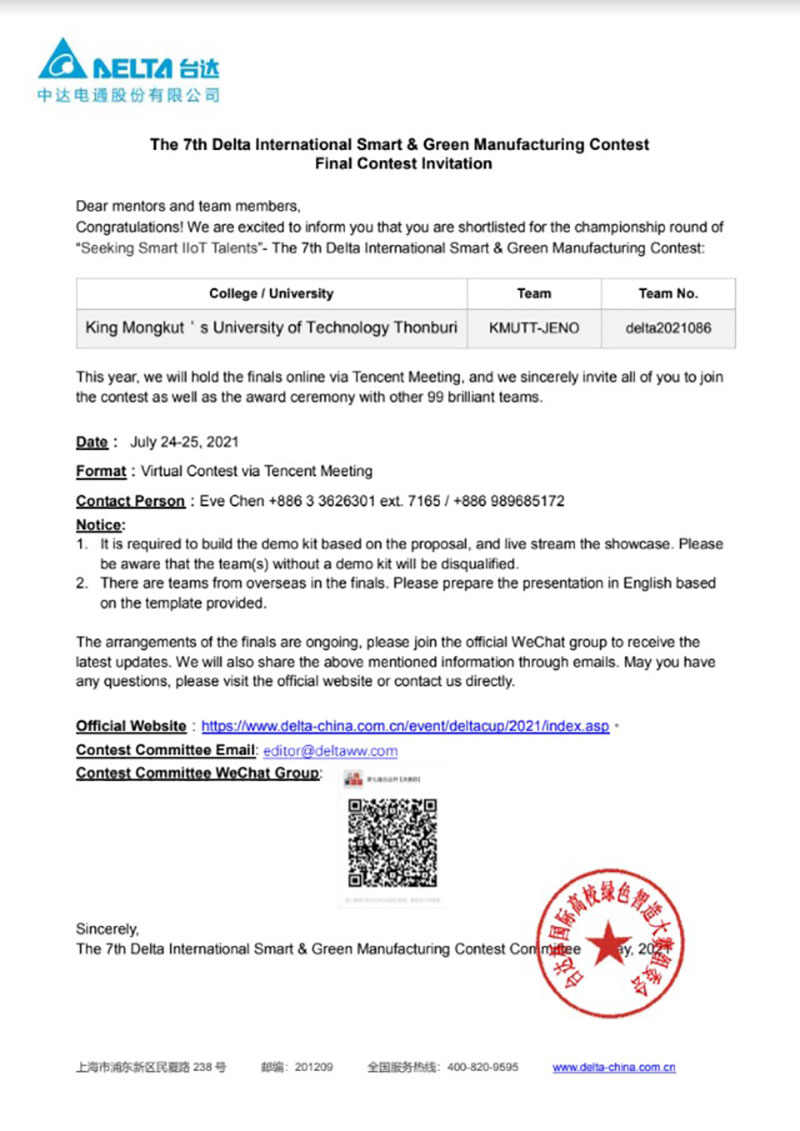
ด้วยแนวคิดที่นำหุ่นยนต์ขันโตก ที่เป็นหุ่นที่มีการนำไปใช้งานจริง มาพัฒนาต่อยอดไปสู่การในงานที่สอดคล้องกับสถานการณ์ และเป็นการใช้จุดเด่นของ การควบคุมระยะไกล มาสนับสนุนการทำงานของมนุษย์อย่างเหมาะสม ทำให้เอกสารโครงการพัฒนาหุ่น Tiny Carrier ได้รับการคัดเลือกให้เป็น 1 ใน 3 โครงการ ที่ได้เข้าร่วมแข่งขันในระดับนานาชาติ The 7th Delta International Smart & Green Manufacturing Contest ในปีนี้ (จากโครงการนักศึกษาที่ส่งเข้าประกวด 50 โครงการ) เมื่อเดือนพฤษภาคม 2564
ซึ่งจากการนำเสนอที่กำหนดไว้ในเดือนกรกฎาคม 2564 เท่ากับว่า ทีม KMUTT-JENO มีเวลาไม่ถึง 2 เดือน ในการสร้างหุ่นยนต์ที่ทำงานได้จริงให้แล้วเสร็จ
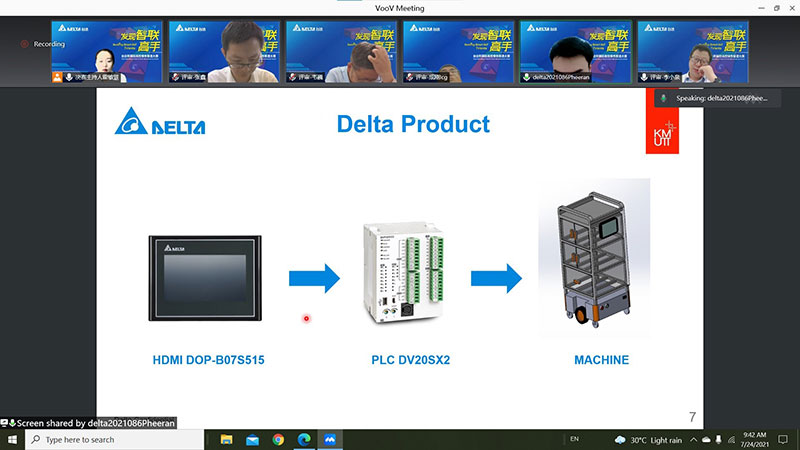
“เรามีการแบ่งหน้าที่ทำงานอย่างชัดเจน ผมกับพี่พีจะทำด้าน Hardware ที่เป็นโครงตัวหุ่น รวมถึงระบบ software ที่เป็นวงจรขับเคลื่อนของตัวหุ่น และ Sensor ที่ใช้ในการตรวจวัดต่างๆ ส่วนพี่ปัญปัญ จะเป็นคนพัฒนาระบบกล้องด้านหน้า ที่เกี่ยวกับการตรวจับสิ่งกีดขวางระหว่างการเคลื่อนที่ของหุ่นยนต์ รวมถึงกล้องอ่าน QR-Code เพื่อยืนยันตัวตนในการรับยา ก่อนที่จะนำสิ่งที่แต่ละคนพัฒนา มาประกอบกันเป็นตัวหุ่นยนต์ ในช่วงเดือนสุดท้ายที่เราได้มาอยู่ในหอพักของมหาวิทยาลัยร่วมกัน” ปวริศร์ สอนประดิษฐ์ หรือ ฟลุค ให้ข้อมูลเกี่ยวกับการพัฒนาหุ่นยนต์

ณัฐพัสตร์ เกษศรีรัตน์ หรือ ปัญปัญ ซึ่งเป็นพี่ใหญ่ของทีม กล่าวเสริมว่า การใช้ความสามารถของแต่ละคน เช่น พีรณัฐ ที่เก่งเรื่อง Software และปวริศร์ ที่ถนัดเรื่อง Hardware มาทำเกี่ยวกับตัวหุ่นยนต์ ระบบขับเคลื่อน และเซนเซอร์ต่างๆ ส่วนตัวเองก็ใช้ความรู้ที่เกี่ยวข้องกับการทำ Mobile Robot ที่เป็นหัวข้อวิทยานิพนธ์ มาช่วยในการพัฒนาเกี่ยวกับระบบกล้อง ซึ่งทั้งหมดนี้ ทำให้การปฏิบัติงานของหุ่นยนต์ ที่นำเสนอต่อคณะกรรมการผ่านระบบออนไลน์เป็นไปได้ด้วยดี

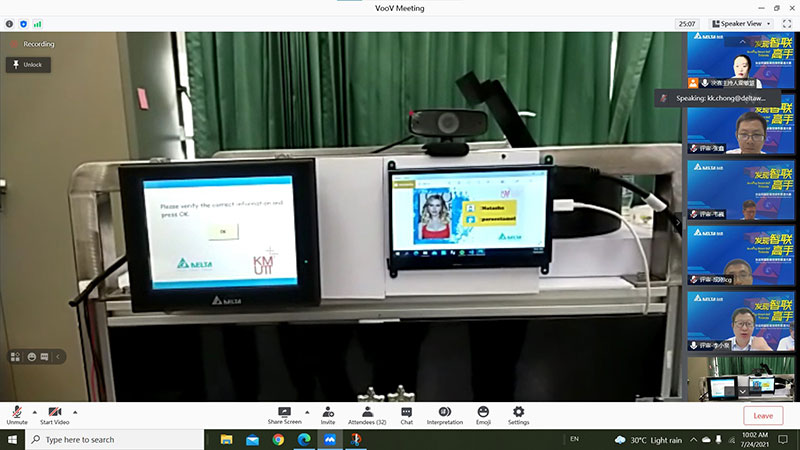
“วันนั้น หุ่นยนต์ของเราสามารถเคลื่อนที่ ไปตามเส้นสีที่กำหนดไว้อยู่บนพื้นได้ด้วยตัวเอง แสดงให้เห็นถึง ระบบกล้องที่ตั้งคำนวณระยะ ระหว่างตัวหุ่นยนต์กับสิ่งกีดขวาง พร้อมทั้งสามารถแยกแยะได้ว่า เป็นคนหรือสิ่งของได้อย่างถูกต้อง พร้อมการส่งเสียงเตือน และเมื่อหุ่นยนต์ไปถึงเป้าหมาย ก็สามารถจ่ายยาให้กับผู้ป่วยสมมุติแต่ละราย ได้อย่างถูกต้อง
โดยเรามีติดตั้งระบบเตือนการรับยาด้วยเสียง ระบบตรวจสอบ QR-Code บนแถบข้อมือคนไข้ด้วยกล้อง เพื่อยืนยันตัวตนของคนไข้แต่ละราย และสามารส่งกล่องยาของผู้ป่วยรายนั้นออกมาที่ช่องรับยาได้อย่างถูกต้อง” พี เล่าย้อนไปถึงช่วงเวลาของการสาธิตการทำงานของ Tiny Carrier ให้คณะกรรมการผ่านระบบออนไลน์ ทำให้ได้รับรางวัล Third Prize จากการประกวด Delta Cup

ดร.อิสสระพงศ์ ในฐานะอาจารย์ที่ปรึกษา กล่าวเสริมว่า การได้รับการคัดเลือกให้เป็น 1 ใน 3 ทีมจากประเทศไทย ที่ได้ไปแข่งขันกับทีมจากประเทศอื่นๆ อีกกว่า 100 ทีม และสามารถคว้ารางวัล Third Prize กลับมาได้นั้น ถือเป็นความภาคภูมิใจของภาควิชาที่เข้าร่วมประกวดรายการนี้เป็นครั้งแรก
“การที่ ภาควิชาวิศวกรรมระบบควบคุมและเครื่องมือวัดของเรา มีการสอนที่ให้นักศึกษามีความรู้ในศาสตร์ด้านต่างๆ อย่างหลากหลาย เพื่อให้สามารถเป็นทั้งวิศวกรวัดคุม (Instrumentation Engineering) ที่เกี่ยวกับเครื่องมือวัดโดยตรง, วิศวกรระบบ (System Engineering) ที่เน้นการแก้ปัญหาของเครื่องมือ หรือวิศวกรอัตโนมัติ (Automation Engineering) ที่เน้นการออกแบบ สร้าง พัฒนา และจัดการระบบต่าง ๆ น่าจะทำให้นักศึกษาเขาสามารถพัฒนาหุ่นยนต์ ที่ตอบโจทย์ของการแข่งขันในครั้งนี้ได้อย่างเหมาะสม จนทำให้ได้รางวัลนี้”

พี กล่าวเสริมว่า อีกส่วนหนึ่งของความสำเร็จในวันนี้ก็คือ การได้ค้นพบตัวเองว่า อยากทำงานด้านไหน มาตั้งแต่เรียนอยู่ในระดับมัธยม เพราะตอนที่เรียนในชั้น ม.5 ได้มีโอกาสมาเข้าค่าย 2B KMUTT กับทาง มจธ. ที่ได้มีโอกาสทำโปรเจคร่วมกับอาจารย์ของ มจธ. และทำให้ได้ค้นพบว่า ตนเองอยากเป็นวิศวกรสายนี้

“แม้ว่าตอนมัธยมปลาย ผมอยู่ชมรมหุ่นยนต์ และได้มีโอกาสเป็นตัวแทนประเทศไทยด้วย แต่การได้มาเข้าค่าย 2B KMUTT ทำให้ตนเองเริ่มสนใจงานด้านวิศวกรรมระบบ (System Integration Engineer) ที่มีความต้องการในตลาดค่อนข้างสูง และมีงานที่หลากหลาย ทำให้เลือกที่จะมาเรียนในภาควิชานี้ ของ มจธ.”
ที่มา www.kmutt.ac.th
บทความแนะนำ
- อยากเรียน เศรษฐศาสตร์ ต้องใช้คะแนนอะไร? เรียนที่ไหน? จบแล้วทำงานที่ไหนได้บ้าง?
- บัญชี กับ การเงิน ต่างกันอย่างไร ? แล้วจะเลือกเรียนอะไร เรียนที่ไหนดี
- เปิด 5 เทรนด์อาชีพเกิดใหม่ ปี 2019 – ยิ่งเก่งภาษาอังกฤษ ยิ่งเงินเดือนสูง
- น่าเรียน 10 หลักสูตรใหม่นอกกระแส จบมาแล้วฮอตแน่นอน ทำงานไม่ซ้ำใคร
- 4 ทักษะสำคัญของการเป็น นักบัญชี – ปรับตัวให้ทันเทคโนโลยี ถ้าไม่อยากให้ AI มาแทนที่











